本文记录了我从零开始配置 ESP-IDF 插件及XR-ESP32S3视觉模块编译烧录过程中遇到的所有典型坑位及其解决方案。
在开始我的双足自平衡车毕业设计之前,搭建一个稳定、高效的 ESP32 开发环境是第一步。虽然官方和各大模组商(如小尺科技)都提供了详细的教程,但在实际操作中,路径问题、缓存残留以及操作逻辑往往会导致一系列令人头大的报错。
本文记录了我从零开始配置 ESP-IDF 插件及XR-ESP32S3视觉模块编译烧录过程中遇到的所有典型坑位及其解决方案。
在安装 ESP-IDF 及其工具链时,最核心的原则就是纯净。
C:\esp-idf),让安装程序自动创建。为了避免后续 CMake 编译链解析失败,项目路径必须严格遵守以下规则:
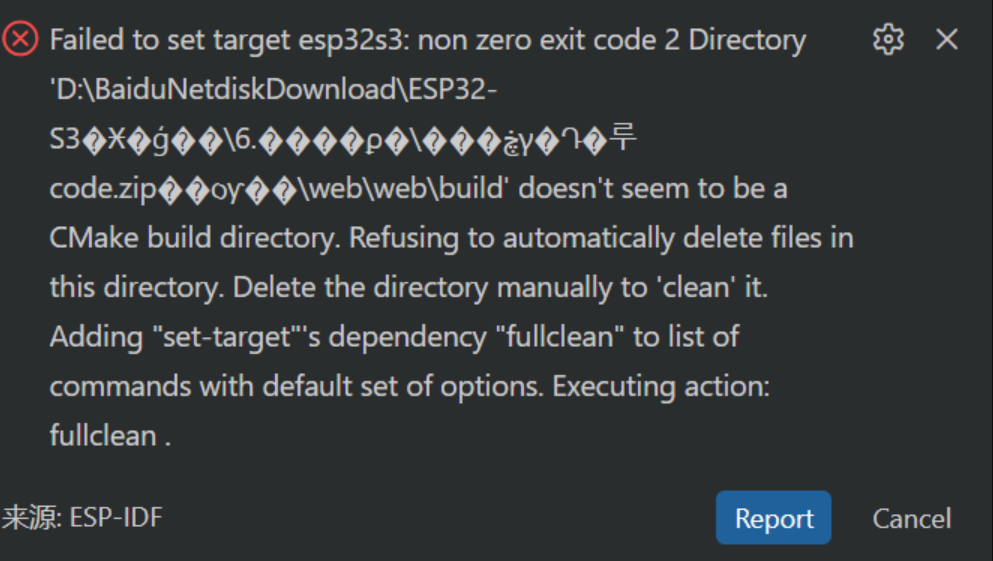
CMakeLists.txt not found in project directory...test),而不是真正的工程根目录(如 web)。CMakeLists.txt 文件和 main 文件夹的那个目录。当你移动了项目位置,或者从别处复制了工程代码后,最容易遇到 exit code 2 报错。
dependencies.lock原因: 项目目录下的 dependencies.lock 配置文件锁定了一个在当前电脑上并不存在的旧路径(通常是绝对路径)。
对策:
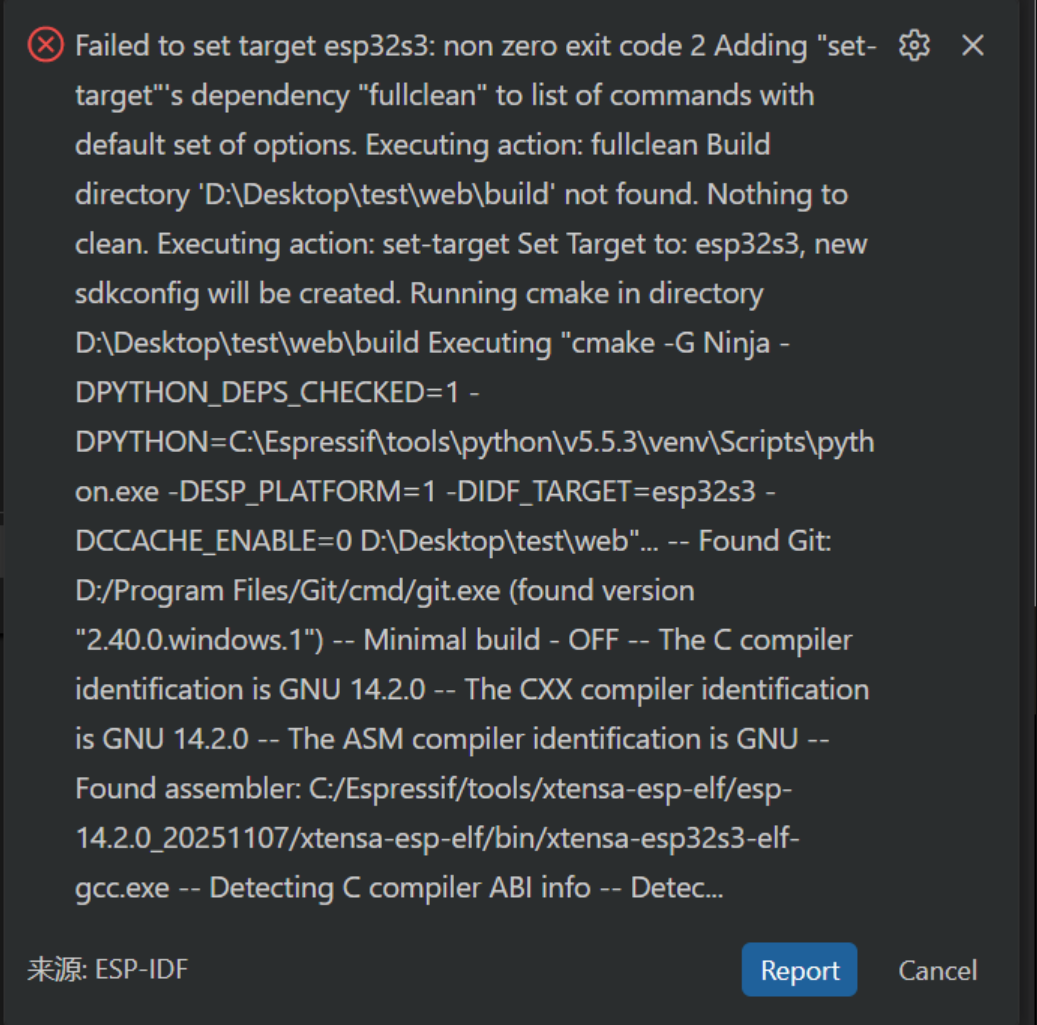
dependencies.lock 文件。build 文件夹(清除旧的编译缓存)。sdkconfig 文件。esp32s3),系统会自动按照当前新路径生成相对路径配置。很多新手(包括我)在配置好芯片型号后,会习惯性地直接点击“闪电”图标去烧录,结果必然报错。

project elf file (xr-ai-cam.elf) is missing from the build dir.elf 文件)。esp32s3。UART ,下载方式推荐选择 ESP-PROG-2。Project build complete。💡 进阶技巧: 直接点击状态栏那个“火焰”图标(一键三连),它会自动按顺序帮你搞定编译、下载、打开串口监视器。
| 图标 | 功能描述 |
|---|---|
| ESP-IDF vX.X | 配置使用的 ESP-IDF 版本号 |
| COMX | 配置模块连接电脑后的串口号 |
| esp32s3 | 配置当前开发板的目标芯片型号 |
| 圆柱体 (Build) | 编译当前工程代码 |
| 闪电 (Flash) | 将编译后的程序上传到模块 |
| 小火焰 | 一键执行:编译 + 烧录 + 打开串口终端 |
例如:

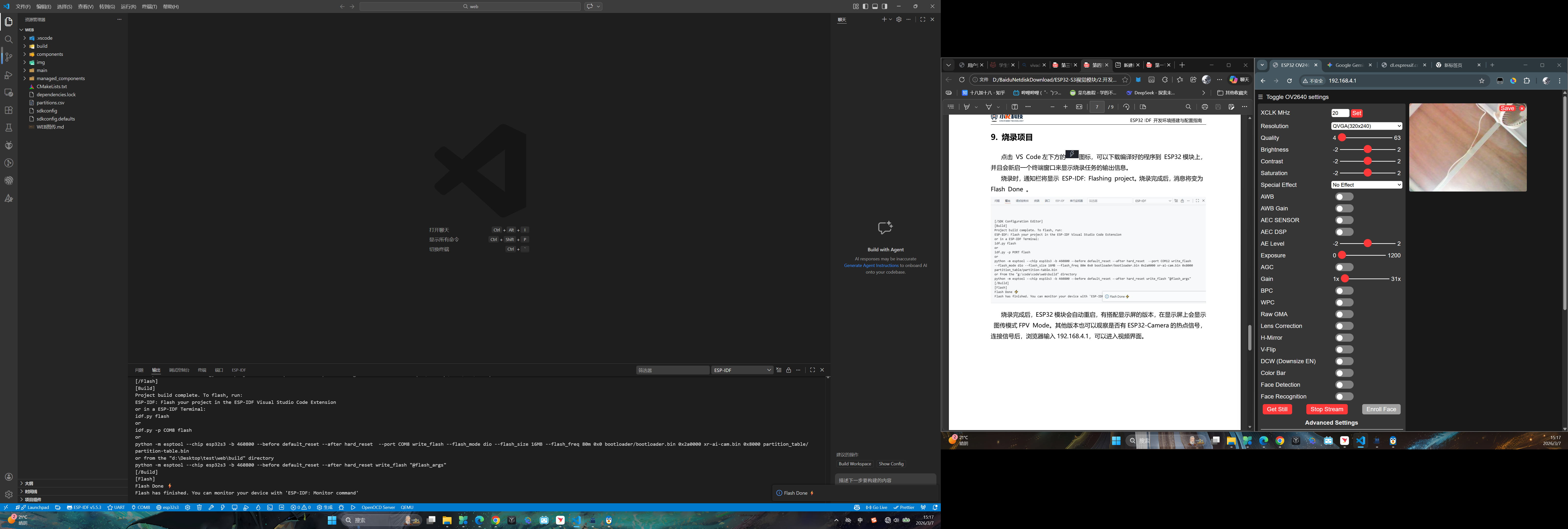
烧录成功后,模块会自动重启。如果是带屏幕的型号,屏幕上会显示 FPV Mode;你也可以通过手机搜索 ESP32-Camera 的热点并访问 192.168.4.1 来查看实时画面。 环境搭建虽然琐碎,但只要遵循“路径纯净、定期清理、顺序编译”的原则,大部分问题都能迎刃而解!
参考资料:
欢迎来到我的留言板,留下你的足迹,与我分享你的想法和感受。
点击文本框会有惊喜哦`(。•̀ᴗ-)✧